Theorie
Een discreet dynamisch model is een rekenmodel voor een praktische situaties die met de tijd in vaste stappen verandert. Zo'n model bestaat uit
- variabelen die met de tijd veranderen;
- modelformules van de vorm `u(t+1) = u(t) + Delta u(t)` waarin `u` een variabele en `t` de tijd voorstelt;
- parameters, constanten die je nog kunt aanpassen.
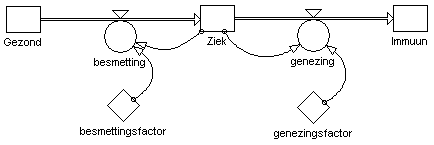
Die parameters vind je terug in de uitdrukking die `Delta u(t)` beschrijft. Ze zijn vaak gebaseerd op bepaalde modelaannames, bijvoorbeeld een schatting van het percentage dat verandert. Hier zie je een eenvoudig griepmodel gemaakt met PowerSim.
Bij ingewikkelder modellen kun je ook de tijdstap nog aanpassen. Die is dan niet altijd 1, maar wordt aangegeven met `Delta t` of dt. Voordeel daarvan is dat je door de tijdstap kleiner te maken een continu veranderingsproces kunt benaderen.